PCL:点云保存遇到的问题及解决方法
本文共 561 字,大约阅读时间需要 1 分钟。
之前已经完成kinect2实时获取点云,那么接下来准备将点云保存到本地,点云扩展名为pcd。在网上查找资料普遍都是这个方法。
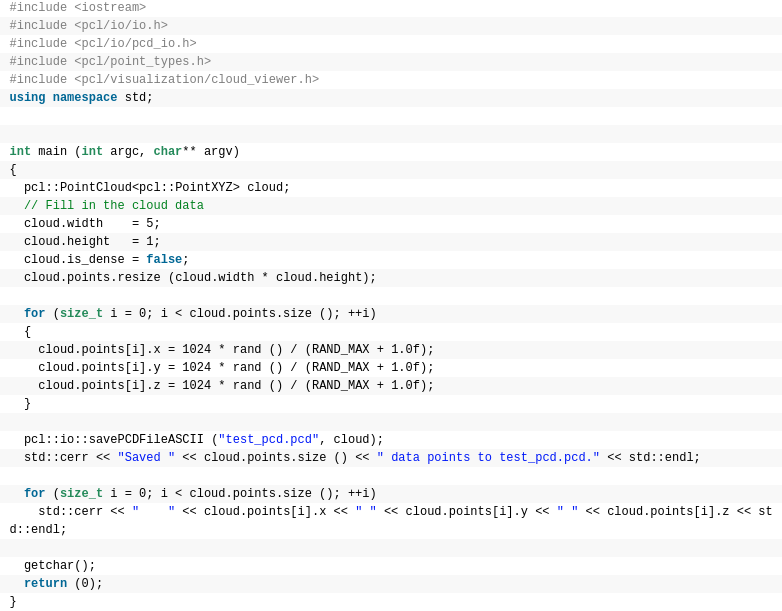
我就按着这个步骤尝试,首先创建一个空点云(pcl::PointCloud<pcl::PointXYZ> cloud;),接着定义点云的大小和格式,然后把信息写入点云,再使用(pcl::io::savePCDFileASCII ("test_pcd.pcd", cloud);),保存为pcd文件。
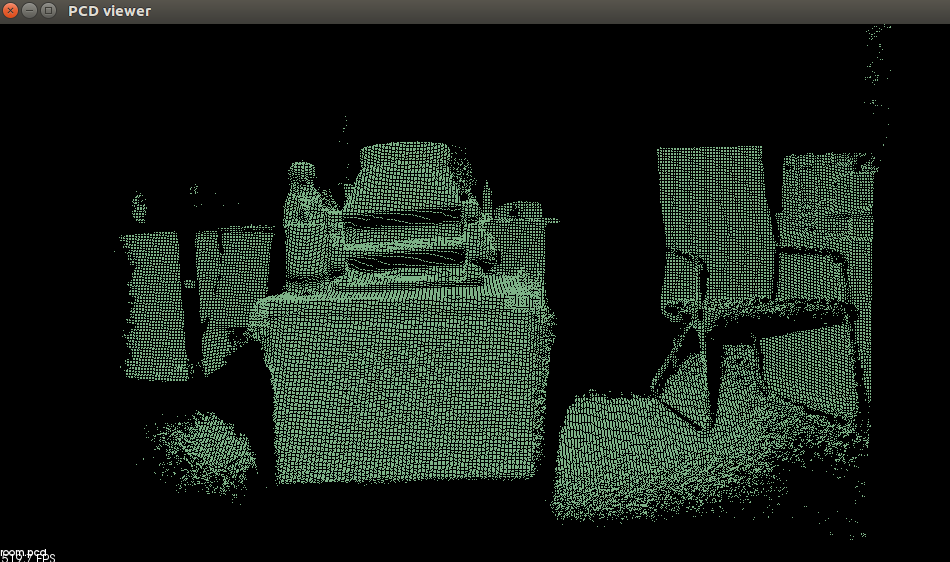
但是在将点写入点云时,遇到了点问题,因为我的点是通过像素坐标系转换成相机坐标系得到的,所以无法直接使用遍历size来将点写入,这也是我之前输出点云为什么只有一半的原因。
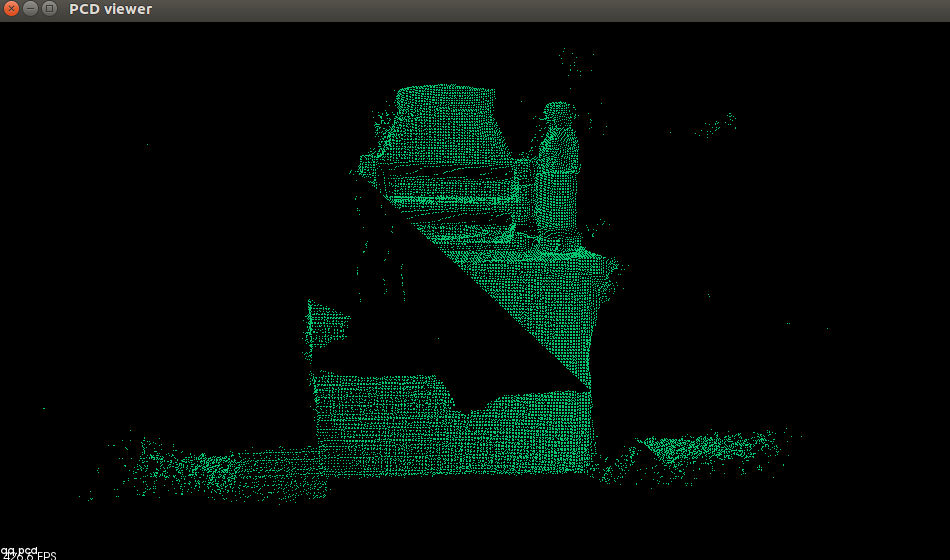
一半点云缺失
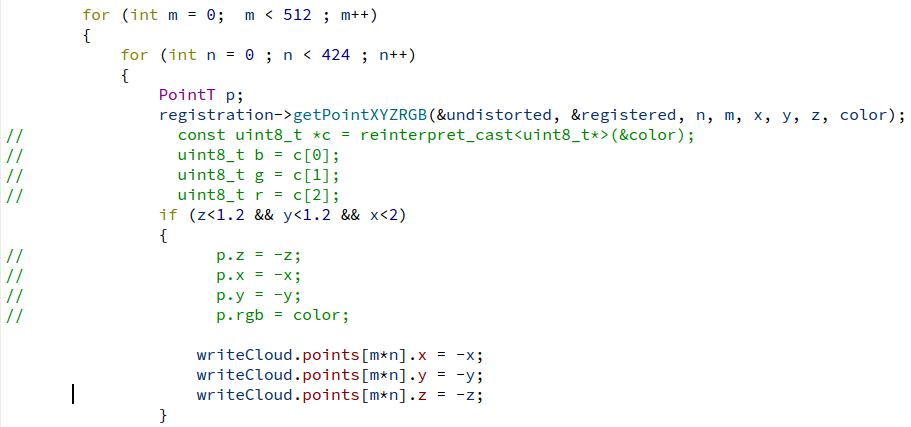
之前的点云写入代码
再通过仔细观察后,终于找到了问题所在根源,因为points的写入方法是按顺序从0~mn-1遍历写入,如图(m,n为矩阵下标):
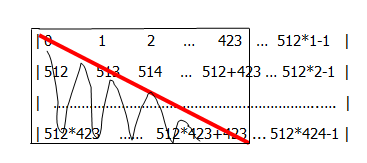
覆盖上一个(10,20)点的写入,就出现了上述一半点云无法显示的问题,就如上图红线下方区域无法显示。 解决方法是:
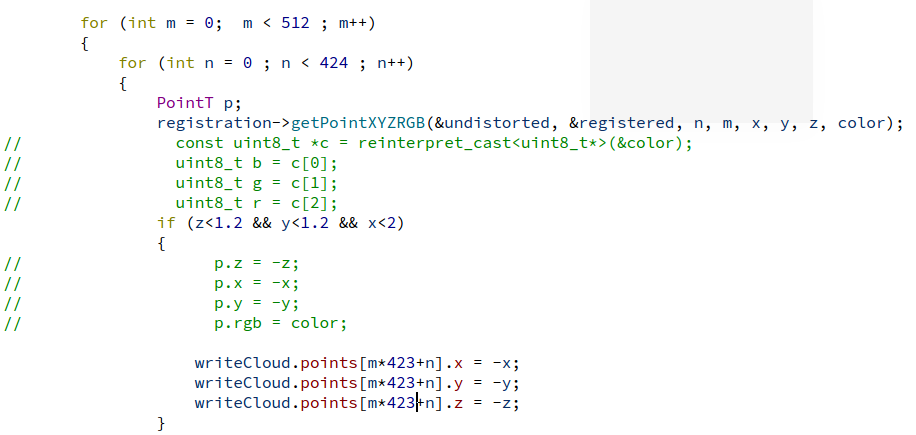
在写入点的时候修改成m*423+n就可以完美解决这个问题,每个点都有且只有一个数对应。修改完后完美显示。
转载地址:http://nqtpo.baihongyu.com/
你可能感兴趣的文章
Linux文件系统之挂载U盘
查看>>
awk——报告生成器
查看>>
oracle 体系结构
查看>>
Nginx+Keepalived搭建高可用负载均衡集群
查看>>
聚合链路及故障排查
查看>>
zabbix监控mysql以及报警(二)终
查看>>
后台服务程序开发模式
查看>>
VS2015 正式版中为什么没有了函数前面引用提示了?
查看>>
windows 系统的安装和虚拟机共享文件夹
查看>>
python—爬虫
查看>>
arp协议的混乱引发的思考--一个实例
查看>>
systcl -p 报错 error: "net.bridge.bridge-nf-call-ip6tables" is an unknown key
查看>>
Why Public Cloud is Not a Security Concern
查看>>
安装centos
查看>>
[C#]创建Windows用户及组
查看>>
一步一步教你使用AgileEAS.NET基础类库进行应用开发-基础篇-UDA中处理事务
查看>>
线程优先级
查看>>
多种方法获取sys_call_table(linux系统调用表)的地址
查看>>
初识SQL Server2017 图数据库(一)
查看>>
分享50款 Android 移动应用程序图标【下篇】
查看>>